

三次元姿勢計測を用いた人の動作特徴の記述
1.モチベーション
人と共生するパートナーとは
◆機械は人の命令で動く(従来の考え方)
- 人が命令する(あらかじめプログラムする)と、そのとおり動くことが重要である。
◆機械は人のパートナーである(未来の考え方)
- 人も機械も自律的に動くが、機械はいつも人の望むであろうことを 予測・確認しながら動く
環境に埋め込み型、多数カメラによる人の状態推定
いつ、話しかけるとよいかという間合いを計る
2.アプローチ
ビジョンを用いた動作・姿勢認識で、人の状態をどの程度推測できるか検証する
仮説:
話しかけるのに最適なタイミングは、人が何かに没頭していないときである。
何かに没頭していれば、体の姿勢や動きの激しさに現れるのではないか?
何もしていないときには楽な姿勢をとるはず。
楽な姿勢(筋肉の緊張がない)からの変化で、集中(没頭)の度合いが表現できる
3.問題の定義
人の姿勢が時系列の三次元ボリュームとして与えられたときに、ある作業への集中度の変化を定量的に表現
人の姿勢を安楽姿勢を基準に、体を持ち上げ、保持するのに必要な仕事量、体を動かし続けるための仕事量、 及び寄りかかることによって節約される仕事量の和(自己負荷量)で表現する
4.自己負荷量の計算
自己負荷量=単位時間あたりのエネルギー投入(すなわち仕事量)と定義し、エネルギーを位置エネルギー+運動エネルギー+姿勢保持エネルギーの和で表す
重力加速度、下腕の長さ、下腕の質量、下腕の重心の高さ、時刻(t)における角速度を示す
![]()
姿勢保持エネルギーは、関節にかかる重力モーメントを基準に定義する
計測する人体部位における自己負荷量の総和を取り、時間平均を取る
今回の解析では、椅子に座った姿勢を用い、左下腕、右下腕、左上腕、右上腕、上半身(腰から上)の総和を取った。
5.姿勢計測の実際
- 座位の人物の計測を行う
- 初期探索点として、
- 頭頂部、両肩の中心
- 右肩、左肩関節位置 の順に求める
- 肩から腕の末端、及び両肩中心から腰に向かって球形テンプレートを走査し、円筒モデルを当てはめる
- マネキンでの計測精度は 5-13(deg)
6.実験(1)待ち構え
- 初期状態は、何も指示がなく、画面(4)のテレビを眺めている暇な状態
- 次に、画面(4)に四角い表示が表れたら、消えるまでに手をたたいて知らせる作業を指示する
- 消えるまでの時間がステップが進むと短くなり、真剣に待ち構えないと間に合わない
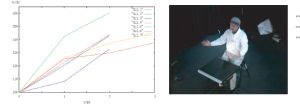
所見:
自己負荷量の安楽時からの増分とステップ(作業の集中要求度)に高い相関あり。ただし、安楽時自己負荷量には個人差が多い。ステップ3で動きが速すぎたり、追従できずにあきらめて負荷量計測不能の事例が多い。
7.実験(2)キャッチ
- 初期状態は、何も指示がなく、画面(4)のテレビを眺めている暇な状態
- 次に、画面(4)に四角いボックスが現れて走り回るので、マウスを操作してキャッチするという作業を与える
- 走り回る速さがステップが進むとともに速くなり、真剣に追いかけないと捕まえられない
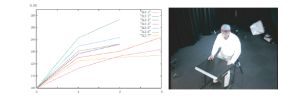
所見:
- 自己負荷量の安楽時からの増分とステップ(作業の集中要求度)に高い相関あり
- 自己負荷量の内訳は、姿勢保持エネルギーが90%以上を占めており、手を速く動かすから自己負荷量が増加するわけではない(主に、待ち構える姿勢によるものが大きい)
8.結論と今後の展開
人の姿勢が時系列の三次元ボリュームとして与えられたときに、ある作業への集中度の変化を自己負荷量という姿勢と動作の維持に必要な仕事量で表現した。
作業への集中度の要求と、自己負荷量との間には高い相関が見られ、自己負荷量の低下を検知して、インタラクションを開始するという利用方法が考えられる。
安楽時自己負荷量の個人差が大きく、絶対量の計測は困難。体を楽に支える状態の検出が未完成、計測可能な姿勢が限定。
ボリュームだけで出来ることの限界を補うため、顔・視線の認識を加えて、より日常に近い状況での状態計測に発展予定
参考文献
 動的イベントの分節化・学習・認識のためのHybrid Dynamical System
動的イベントの分節化・学習・認識のためのHybrid Dynamical System
川嶋宏彰, 堤公孝, 松山隆司, 第3回情報科学技術フォーラム(FIT2004), pp.175--178, 2004.9 (FIT論文賞)- 力学系の自己組織化に基づく唇映像の構造化
川嶋宏彰, 堤公孝, 松山隆司, 第7回情報論的学習理論ワークショップ(IBIS2004), pp.86--93, 2004.11 - 表情譜: 顔パーツ間のタイミング構造の記述とその自動獲得
西山正紘, 川嶋宏彰, 松山隆司, 情報処理学会研究報告(2005-CVIM-149), Vol.2005, No.38, pp.179-186, 2005.5 (卒論セッション優秀賞)