多くの場合,カメラによる撮像,すなわち3次元シーンから2次元画像平面へ の幾何光学的変換は中心投影によって近似され,パン,チルト運 動を行う首振りカメラでは,中心投影が行なわれる座標系と画像平面が回転す ることになる.通常の首振りカメラでは,カメラの 回転中心と 投 影中心とがずれており,カメラの回転によって投影中心が平行移動され,撮 影された画像の間には運動視差が現れる.このことは,カメラをパン,チルト させることにより,3次元シーン中の物体の見え方が変わり,回転前には見え ていた/見えなかった部分が回転によって見えなくなる/見えるようになるこ とを意味し,首振りカメラを用いたアクティブな対象の検出や,追跡,認識を 困難にしていた.
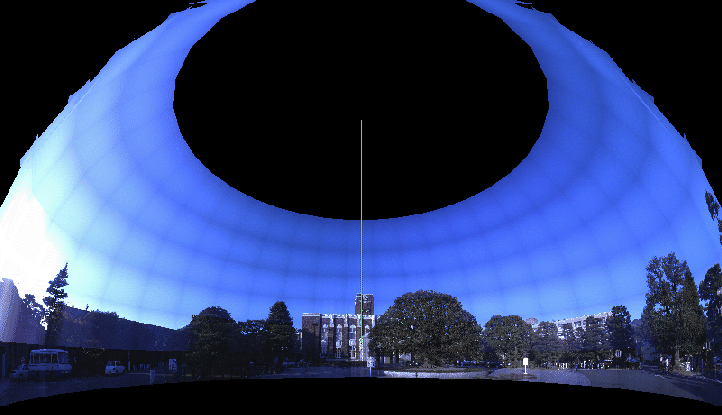
我々は,この問題を解決するには,カメラの回転運動の軸が投影中心を通るよ うにカメラ雲台を設計すればよいと考え,視点(投影中心)を固定したまま, 視線方向を変化させることができる首振りカメラ(視点固定型パン・チルトカ メラ)を設計・試作した(図18)[公開3〜4][学会誌5][国際会 議発表1] .また,このカメラを用いて全天空全方位パノラマ画像を撮影し, 得られた画像を多様な表現で表示するソフトウェアを開発した(図 19).さらに,市販の首振りカメラを視点固定型パ ン・チルト・ズームカメラとして使用するためのカメラキャリブレーションソ フトウェアを開発し,対象追跡や3次元シーンの映像化に有効であることを示 した(図20).この一連のソフトウェアは,現在各種の研究機関や企業で使われている.
![\psbox [width=5cm]{/home/tm/CDV/REPORT/98-3/TWADA/fig3.3/EVI.eps}](img32.png)
SONY EVI-G20
![\psbox [width=0.8\textwidth]{/home/tm/CDV/REPORT/98-3/TWADA/fig3.3/plane.eps}](img39.png)
|

![\psbox [width=\textwidth]{/home/tm/CDV/REPORT/98-3/HIURA/appearance.eps}](img28.png)
![\psbox [width=\textwidth]{/home/tm/CDV/REPORT/98-3/HIURA/aps-camera.ps}](img30.png)
![\psbox [width=\textwidth]{/home/tm/CDV/REPORT/98-3/TWADA/fig3.3/0.eps}](img33.png)
![\psbox [width=\textwidth]{/home/tm/CDV/REPORT/98-3/TWADA/fig3.3/1.eps}](img34.png)
![\psbox [width=\textwidth]{/home/tm/CDV/REPORT/98-3/TWADA/fig3.3/2.eps}](img35.png)
![\psbox [width=\textwidth]{/home/tm/CDV/REPORT/98-3/TWADA/fig3.3/3.eps}](img36.png)
![\psbox [width=\textwidth]{/home/tm/CDV/REPORT/98-3/TWADA/fig3.3/4.eps}](img37.png)
![\psbox [width=\textwidth]{/home/tm/CDV/REPORT/98-3/TWADA/fig3.3/5.eps}](img38.png)